Das Bild zeigt eine Strommast mit 3 Leitern rechts und 3 Leitern links.
Eine typische 3 Phasen Ébertragung.
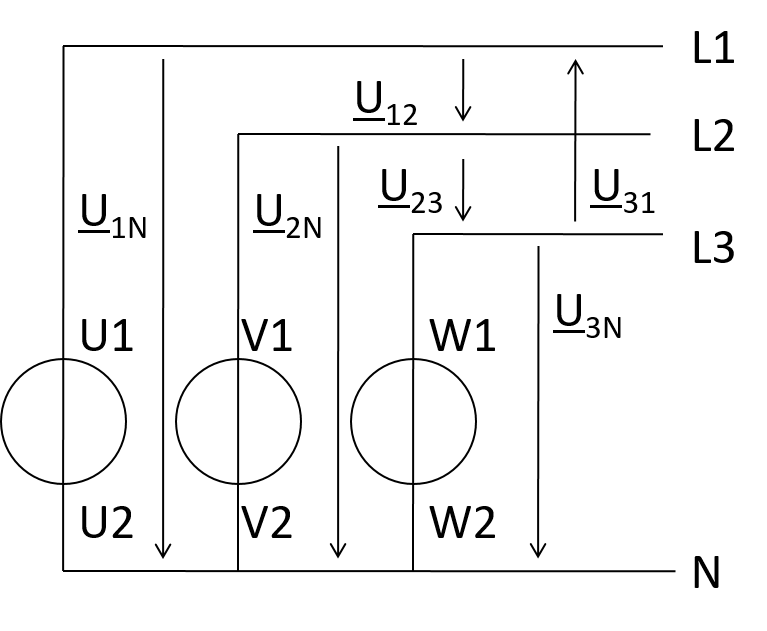
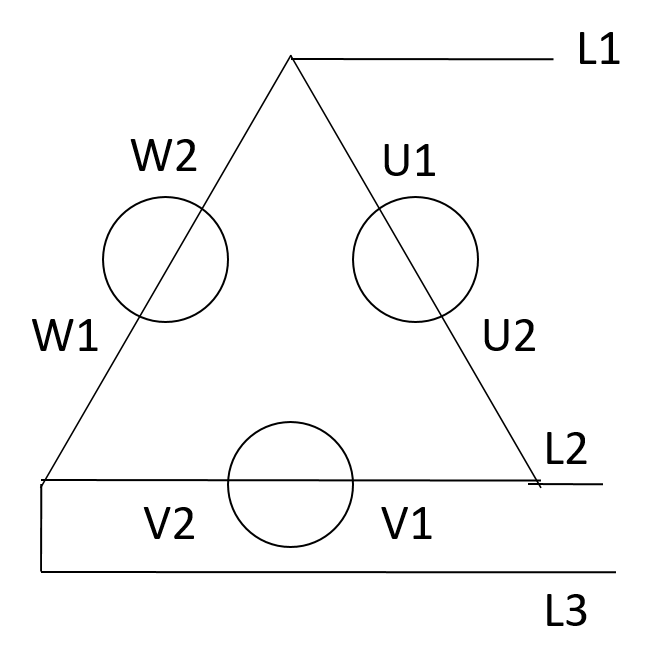
Das symmetrische Dreiphasensystem
Einphasensystem
Haushaltsspannung Eine Hin und eine R■ckleitung
Mehrphasensystem
Mehr als 2 Strombahnen
Teil mit einem einheitlicher Schwingungszustand des Stromes: Strang
In den verschiedenen Strðngen gleiche Frequenz unterschiedliche Nullphasenwinkel
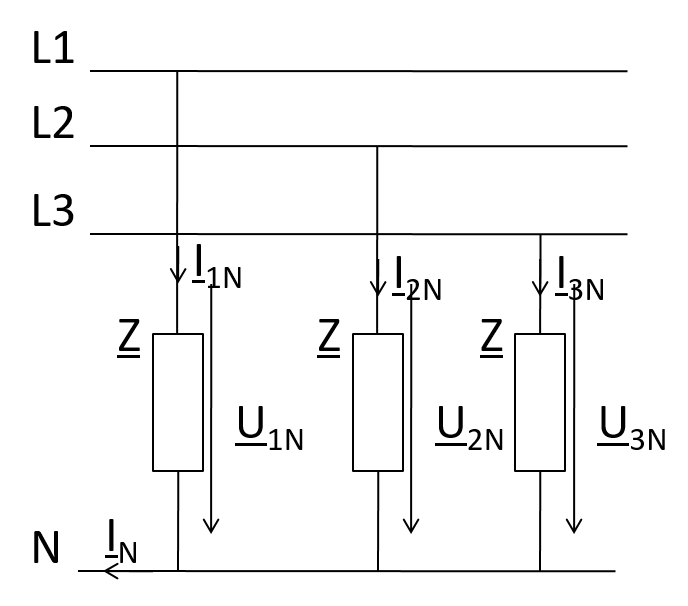
Ein in Stern geschalteter Motor wird am 400 V Drehstromnetz mit f = 50Hz betrieben.
In jedem Strang befindet sich ein Widerstand R = 24 Ω in Reihe mit einer
Induktivitðt L = 44.6 mH.
Der AuÔenleiterstrom und die Leistung, die der Motor aufnimmt, sollen berechnet werden.
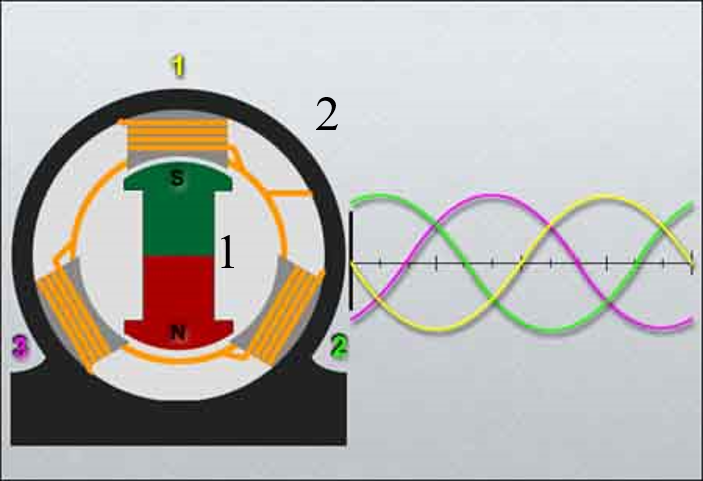
Links sieht man einen Motor mit einem Polpaar P = 1, einem Nordpol, einen S■dpol
und 3 Strðngen (Blau, Rot, Gr■n).
Rechts sieht man einen Motor mit P = 2, 2 Nordpolen, 2 S■dpolen
und 6 Strðngen (Blau, Rot, Gr■n).
Praxisbezug:Polpaarzahl
Langsame Drehstromgeneratoren haben eine hohe Polpaarzahl
Beispiel: p=40, f=50Hz, Drehzahl=75min-1
Anzahl der Pole
Polpaarzahl p
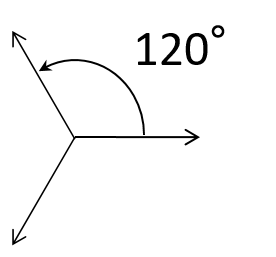
α
Drehzahl bei 50 Hz 1/s
Drehzahl bei 50Hz
1/min
2
1
120¯
50
3000
4
2
60¯
25
1500
6
3
40¯
16.67
1000
8
4
30¯
12.5
750
10
5
24¯
10
600
12
6
20¯
8.33
500
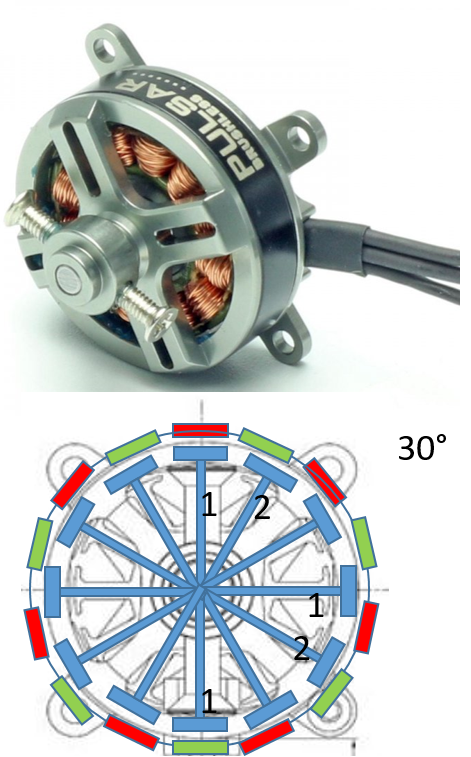
Praxisbezug: Drohnenmotor
Drohnenmotor:
Brushless Motor PULSAR Shocky Pro 2204 / 1800 KV
Abmessungen = 27 x 13mm
Gewicht = 22g
Leerlaufdrehzahl pro Volt = 1800 U/Min-1 (KV)
Konfiguration = 12N14P (12 Nuten (Strðnge)/ 14 Pole (7 Polpaare))
Imax = 9 A(10s)
R = 0.304 Ω
Pmax = I2 R = 24 W
L = 18 uH
XL = 2 π f L
\( f (X_L = 0.3 \Omega) = \frac{R}{2 \pi L} = 2.6 kHz\)
Leistungstabelle
Warum zeigt die Leistungstabelle Leistungen gr—Ôer als 24 W?
Der Strom erh—ht sich durch das ben—tigte Drehmoment.
Die wirksame Spannung am Motor verringert sich durch die
Back EMF (Electro magnetic force) der induzierten Spannung durch die Permanentmagnete.